Ще один робот навчився робити сальто назад
Якщо ж робот все-таки впав, він вміє самостійно вставати на ноги
Робот дуже стійкий
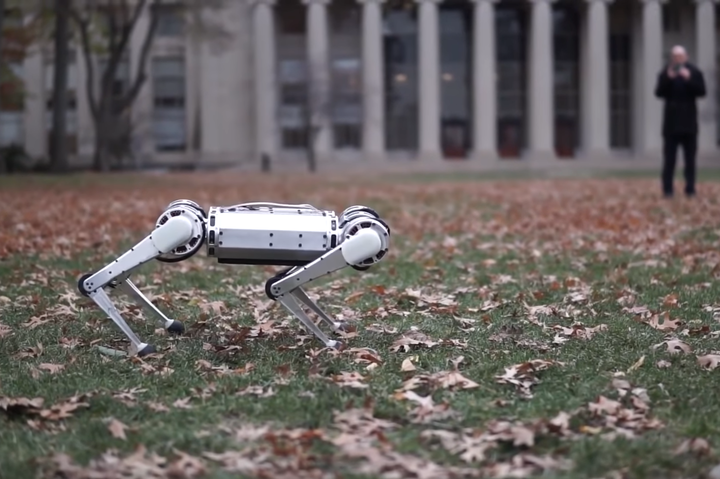
Розробники з Массачусетського технологічного інституту створили робота Mini Cheetah, який вміє робити сальто назад і акуратно приземляється на ноги при падінні з невеликої висоти.
Робот важить дев'ять кілограмів. Серед іншого робопес здатний бігати зі швидкістю до 8,8 кілометрів на годину, пересуватися стрибками і бігати боком.
При цьому робот дуже стійкий, при традиційному тесті стусаном в бік він легко відновлює рівновагу. Причому здатний це робити не тільки крокуючи на місці, як багато роботів, але і з повністю нерухомого положення. Якщо ж робот все-таки впав, він вміє самостійно вставати на ноги, відштовхуючись коліном для перевороту корпусу в потрібне положення.
Є й інші роботи вже вивчили сальто назад. Один з них досить простий в конструкції - це три з'єднаних сегмента, які роблять протилежне сальто з троса. Інший відомий робот, який опанував зворотне сальто, набагато складніше - це гуманоїдний Atlas, розроблений Boston Dynamics.







Коментарі — 0